카테고리 없음
Micro-ROS with ESP32 tutorial
TSpoons
2024. 7. 27. 11:25
Container 실행
docker run -it --net=host -v /dev:/dev --privileged --name micro-ros osrf/ros:humble-desktop-full
host ( PC)의 usb에 권한 부여
- exit 후 재실행
docker start -ai micro-ros
- 필요한 패키지 설치
sudo apt install python3-rosdep2 (제일나음)
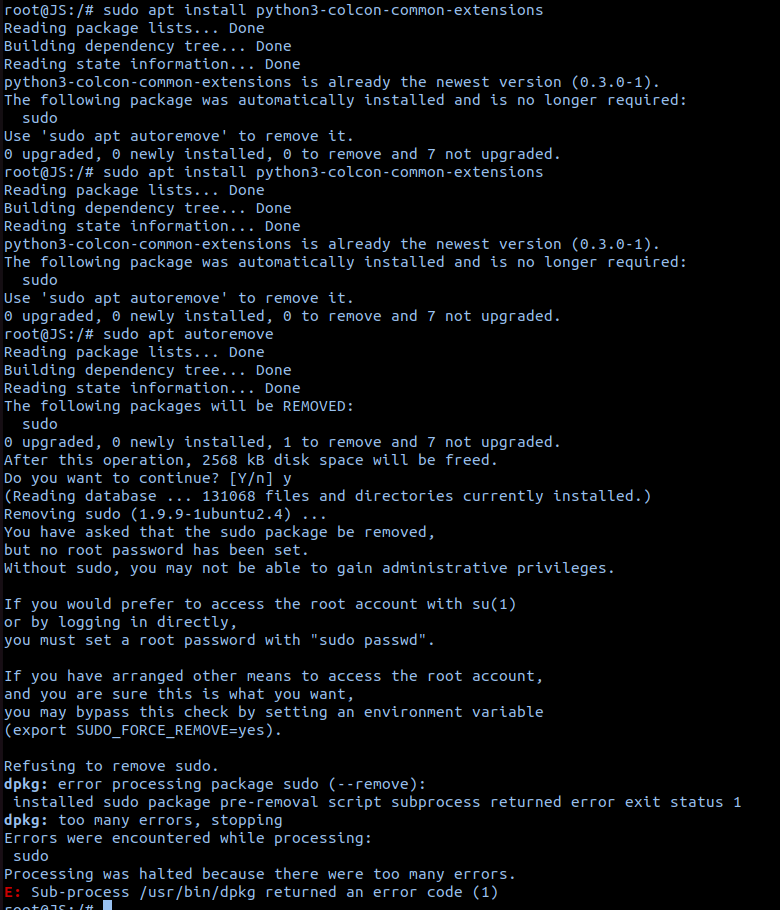
sudo apt install python3-colcon-common-extensions
SOURCE

E: Sub-process /usr/bin/dpkg returned an error code (1)
- Dependecies
sudo apt update && rosdep update
rosdep install --from-paths src --ignore-src -y
- micro-ROS 빌드
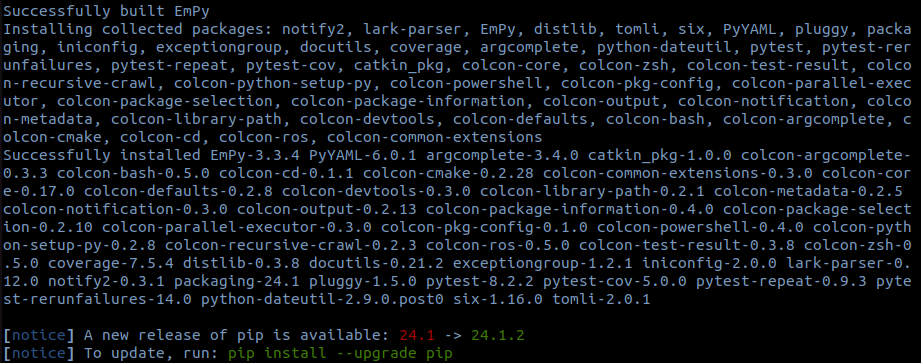
colcon build
micro-ROS firmware 생성
Firmware 구성
ros2 run micro_ros_setup configure_firmware.sh ping_pong --transport serial
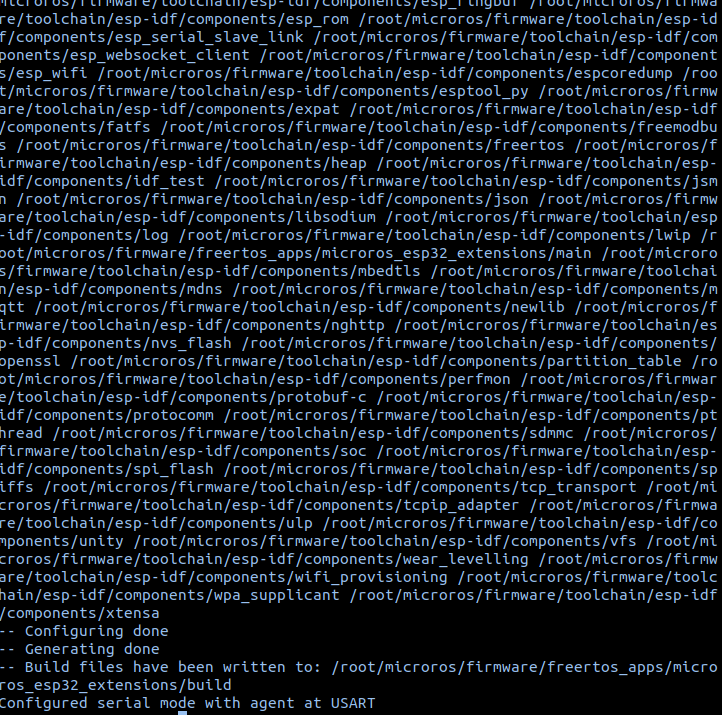
Firmware build
ros2 run micro_ros_setup build_firmware.sh

3.8 usb 포트 권한 부여

sudo chmod a+rw /dev/ttyACM0
ls -l /dev/ttyUSB0

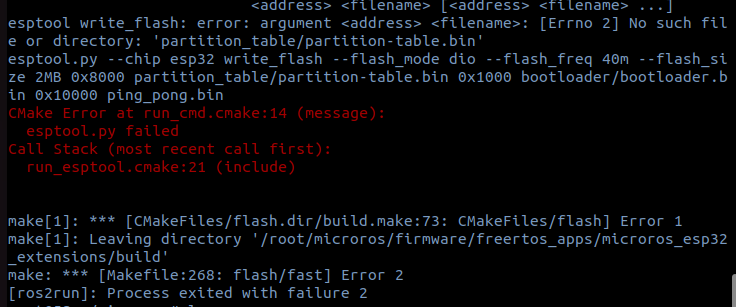
ros2 run micro_ros_setup flash_firmware.sh<Error> :


micro-ROS Agent 생성


터미널 추가로 열고 docker 접속
- topic list 확인


ping & pong test
