RH_control
RH_control.zip
0.00MB
ROS_commuicate.py
0.01MB
RH_control setting

(Main Server에서) RH_lot setting

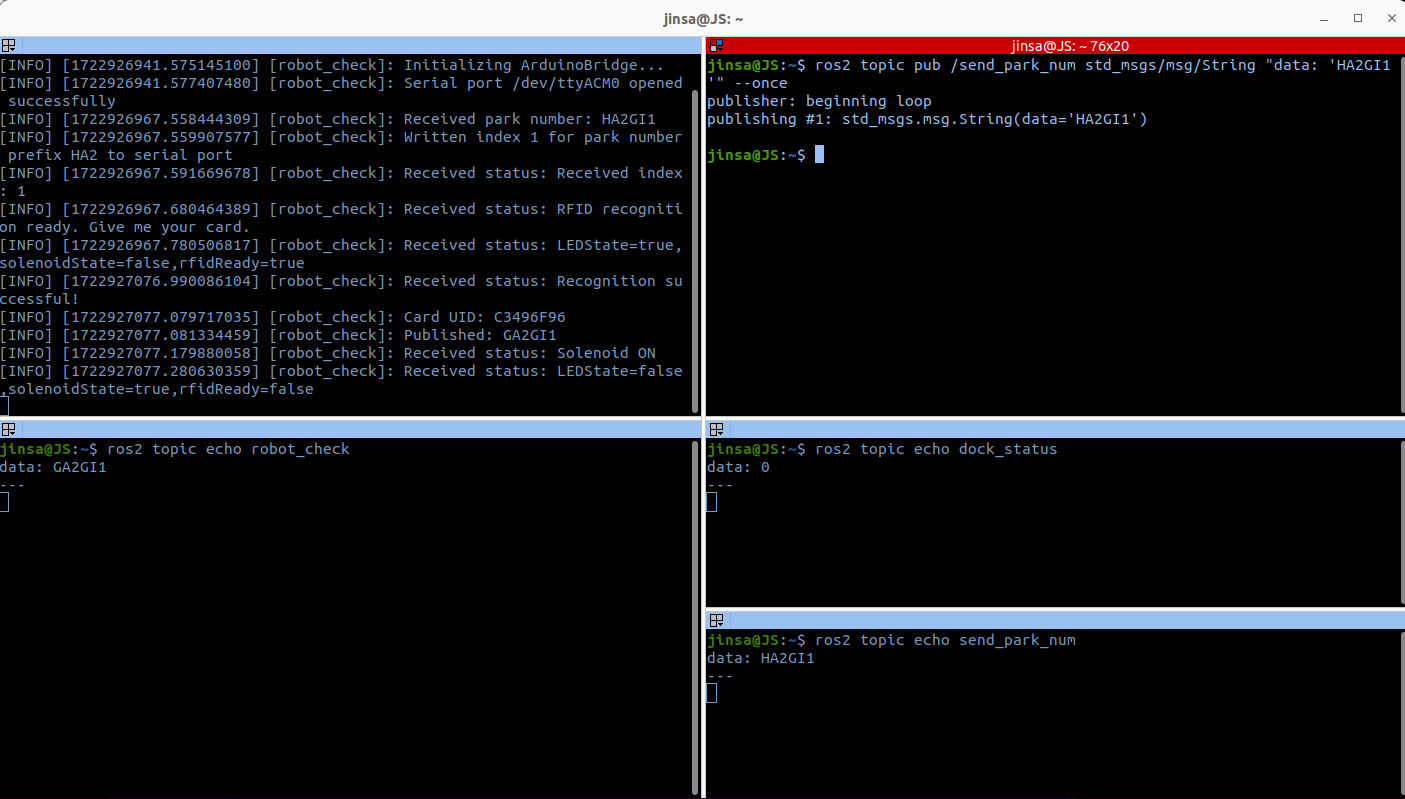
/send_park_num에서 신호(HA2GI1) 보내면,

로봇의 해당 RFID가 인식되는 순간, 전자석 ON /robot_check 에서 신호 전달(docking 완료 - 출발해도 된다는 신호)
이후 /send_park_num에서 다시 로봇에게 신호(HI1GR1)가 온다면,

주차장에 있는 ESP32 dev에 연결된 RFID 리더기에서 특정 구역의 신호를 받고(현재는 모든 RFID tag가 인식되면),
일치한다면

docking 헤제 완료